Table of Contents
How fetch and deliver plans are implemented
We will explain the whole plan implementation pipeline of CRAM bottom up. As the bottom-most level we will use the projection environment.
The package that we will use for examples is cram_pr2_pick_place_demo.
There is a launch file in the package, launch it before starting a node in Lisp.
To start the node in Lisp do:
CL-USER> (roslisp-utilities:startup-ros)
Low-level projection functionality
To move the robot in the Bullet world we use the low-level functions of projection:
cram_pr2_projection/src/low-level.lisp
All the low-level functions use Prolog API of Bullet world to change it.
For example, to drive:
CL-USER> (urdf-proj::drive (cl-transforms-stamped:make-pose-stamped "map" 0.0 (cl-transforms:make-3d-vector 0.5 0 0) (cl-transforms:make-identity-rotation)))
To move torso:
CL-USER> (urdf-proj::move-torso 0.3)
To call perception, let's spawn an object and perceive it:
CL-USER> (btr-utils:spawn-object 'cup-1 :cup :pose (cl-transforms:make-pose (cl-tf:make-3d-vector 1.5 0.0 1.3) (cl-tf:make-identity-rotation))) CL-USER> (urdf-proj::detect (desig:an object (type cup))) #<A OBJECT (TYPE CUP) (NAME CUP-1) (POSE ((:POSE #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.531307883284417d9 #<3D-VECTOR (1.0d0 0.0d0 1.299999998509884d0)> #<QUATERNION (0.0d0 0.0d0 0.0d0 1.0d0)>>) (:TRANSFORM #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "cup_1", STAMP: 1.531307883284417d9 #<3D-VECTOR (1.0d0 0.0d0 1.299999998509884d0)> #<QUATERNION (0.0d0 0.0d0 0.0d0 1.0d0)>>)))>
Motion designators for mobile manipulation
For any mobile manipulation robot the common motion designators of CRAM are supported. This is used, such that the pick and place plans could be applied to any robot in real world or simulation.
The definitions are in cram_common/cram_common_designators/src/motions.lisp
Motion designators are resolved (or ground) into one command symbol and arguments.
The command symbol belongs to the cram_common_designators package namespace.
Projection process modules
The PMs are implemented in cram_urdf_projection/src/process-modules.lisp
To directly call a PM, use PM-EXECUTE function:
CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "map" 0.0 (cl-transforms:make-3d-vector 0.75 0 0) (cl-transforms:make-identity-rotation)))) (cram-process-modules:pm-execute 'urdf-proj::urdf-proj-navigation (desig:an motion (type going) (pose ?pose)))))
What happens is, we send a motion designator to the specific process module.
To automatically dispatch motion designators to their correct PMs, there are the matching-process-module Prolog predicates (implementation is in the same process-modules.lisp file).
To execute a motion with automatic PM dispatching, use exe:perform or cram-executive:perform:
CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "map" 0.0 (cl-transforms:make-3d-vector 0.75 0 0) (cl-transforms:make-identity-rotation)))) (cram-executive:perform (desig:an motion (type going) (pose ?pose)))))
urdf-proj:with-projected-robot is implemented in cram_urdf_projection/src/projection-environment.lisp
It activates all the PMs defined in PR2's projection and sets up some environment variables to distinguish between real robot and projected robot, for example the TF publishers and subscribers, in order not to mess up the real robot's TF while it is imagining things in projection.
Atomic actions
Implementation is in cram_common/cram_mobile_pick_place_plans/src/atomic-action-plans.lisp
One atomic action calls one motion designator + does some primitive failure handling + throws world state change events.
We can perform an action of type going, for example:
CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "map" 0.0 (cl-transforms:make-3d-vector 0 0 0) (cl-transforms:make-identity-rotation)))) (cram-executive:perform (desig:an action (type going) (target (desig:a location (pose ?pose)))))))
Or actions for moving arms:
CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "base_footprint" 0.0 (cl-transforms:make-3d-vector 0.7 0.5 0.8) (cl-transforms:make-identity-rotation)))) (cram-executive:perform (desig:an action (type lifting) (left-poses (?pose)))))) CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "base_footprint" 0.0 (cl-transforms:make-3d-vector 0.7 0.5 0.8) (cl-transforms:make-identity-rotation)))) (cram-executive:perform (desig:an action (type reaching) (left-poses (?pose))))))
The atomic action plan for moving arm in cartesian space is move-arms-in-sequence from atomic-action-plans.lisp.
Composite actions: picking and placing
Picking up action does not have any navigation. The robot has to be standing in the correct place and looking at the object and having had perceived it already.
Let's pick up a cup:
CL-USER> (btr-utils:spawn-object 'cup-1 :cup :pose (cl-transforms:make-pose (cl-tf:make-3d-vector 0.5 0.3 1.0) (cl-tf:make-identity-rotation)))
First we need to navigate to (0 0 0), then we need to look at the object:
CL-USER> (urdf-proj:with-projected-robot (cram-executive:perform (let ((?pose (cl-transforms-stamped:make-pose-stamped "base_footprint" 0.0 (cl-transforms:make-3d-vector 0.7 0.5 0.8) (cl-transforms:make-identity-rotation)))) (desig:an action (type looking) (target (desig:a location (pose ?pose)))))))
Then we perceive the object:
CL-USER> (urdf-proj:with-projected-robot (cram-executive:perform (desig:an action (type detecting) (object (desig:an object (type cup))))))
Then we pick it up. Picking up is implemented in pick-place-plans.lisp and it's corresponding -designators.lisp.
CL-USER> (urdf-proj:with-projected-robot (let ((?obj *)) (cram-executive:perform (desig:an action (type picking-up) (object ?obj) (arm left) (grasp top)))))
Object got attached through an event, so now it will always follow the robot:
CL-USER> (urdf-proj:with-projected-robot (let ((?pose (cl-transforms-stamped:make-pose-stamped "map" 0.0 (cl-transforms:make-3d-vector -0.5 0 0) (cl-transforms:make-identity-rotation)))) (cram-executive:perform (desig:an action (type going) (target (desig:a location (pose ?pose)))))))
To get rid of the object call:
CL-USER> (urdf-proj:with-projected-robot (cram-executive:perform (desig:an action (type placing) (arm left))))
High-level action plans: fetching and delivering and manipulating environment
Most high-level plans at the moment are implemented in cram_pr2_fetch_deliver_plans. The transport function is a high order function which will use most of the functions in cram_fetch_deliver_plans. Therefore we'll explain this function with an example and show the below function calls. Our goal with the PR2 is to put the bowl from the sink area on the table. To explain the other functions we are going to follow the execution of the other high level functions in the deliver function.
We do this by loading the packages cram_pr2_pick_and_place and cram_bullet_world_tutorial …
(ros-load:load-system "cram_pr2_pick_place_demo" :cram-pr2-pick-place-demo) (ros-load:load-system "cram_bullet_world_tutorial" :cram-bullet-world-tutorial)
… and call the following functions:
(in-package :cram-bullet-world-tutorial) (roslisp-utilities:startup-ros) (urdf-proj:with-projected-robot (cram-pr2-pick-place-demo::demo-random nil '(:bowl)))
After that the robot gets correctly positioned and kitchen objects spawned before starting.

Since we passed (demo-random) the object of type bowl the actions searching and transporting will be executed:
(when (eq ?object-type :bowl) (cpl:with-failure-handling ((common-fail:high-level-failure (e) (roslisp:ros-warn (pp-plans demo) "Failure happened: ~a~%Skipping the search" e) (return))) (let ((?loc (cdr (assoc :breakfast-cereal object-fetching-locations)))) (exe:perform (desig:an action (type searching) (object (desig:an object (type breakfast-cereal))) (location ?loc)))))) (cpl:with-failure-handling ((common-fail:high-level-failure (e) (roslisp:ros-warn (pp-plans demo) "Failure happened: ~a~%Skipping..." e) (return))) (if (eq ?object-type :bowl) (exe:perform (desig:an action (type transporting) (object ?object-to-fetch) (location ?fetching-location) (target ?delivering-location)))
If any of the actions fails, we just skip them. In the above code snippet the action of type searching is first executed and then an action of type transporting. Since the transport action uses more high-level functions, we will explain its contents at the end and start with functions which are direct or indirect used by the transport action. Let's start with search-for-object first, which is called in the executing of the searching action.
search-for-object
(defun search-for-object (&key ((:object ?object-designator)) ((:location ?search-location)) ((:robot-location ?robot-location)) (retries 3) &allow-other-keys) (declare (type desig:object-designator ?object-designator) ;; location desigs can turn NILL in the course of execution ;; but should not be passed as NILL to start with. (type (or desig:location-designator null) ?search-location ?robot-location))) "Searches for `?object-designator' in its likely location `?search-location'. If the object is not there or navigation location is unreachable, retries with different search location or robot base location."
The input parameters are the object which should be searched from the location ?robot-location at the location ?search-location. retries says how often we should try again to find a object at a specific robot location.
(cpl:with-failure-handling ((desig:designator-error (e) (roslisp:ros-warn (fd-plans search-for-object) "Desig ~a could not be resolved: ~a~%Propagating up." ?search-location e) (cpl:fail 'common-fail:object-nowhere-to-be-found :description "Search location designator could not be resolved.")))
If the referencing of below designators fails the error object-nowhere-to-be-found will be thrown.
The basic idea is the following: First the robot tries to navigate to the location ?robot-location. If this is succeeded within a number of retries the robot tries now to turn towards the location ?search-location and detect the object within the number of specific retries too.
Now if the robot cannot detect the object or cannot navigate to the ?robot-location, we jump above the navigation part, set a new ?search-location and try all above again. This is done maximal outer-search-location-retries times.
;; take new `?search-location' sample if a failure happens and retry (cpl:with-retry-counters ((outer-search-location-retries 2)) (cpl:with-failure-handling ((common-fail:object-nowhere-to-be-found (e) (common-fail:retry-with-loc-designator-solutions ?search-location outer-search-location-retries (:error-object-or-string e :warning-namespace (fd-plans search-for-object) :reset-designators (list ?robot-location) :rethrow-failure 'common-fail:object-nowhere-to-be-found) (roslisp:ros-warn (fd-plans search-for-object) "Search is about to give up. Retrying~%"))))
So here we set a new ?search-location since we could not move to robot or/and find detect the object.
;; if the going action fails, pick another `?robot-location' sample and retry (cpl:with-retry-counters ((robot-location-retries 10)) (cpl:with-failure-handling (((or common-fail:navigation-goal-in-collision common-fail:looking-high-level-failure common-fail:perception-low-level-failure) (e) (common-fail:retry-with-loc-designator-solutions ?robot-location robot-location-retries (:error-object-or-string e :warning-namespace (fd-plans search-for-object) :reset-designators (list ?search-location) :rethrow-failure 'common-fail:object-nowhere-to-be-found)))) ;; navigate (exe:perform (desig:an action (type navigating) (location ?robot-location)))
Here we try to navigate the robot to ?robot-location and if it fails we try robot-location-retries times again before throwing object-nowhere-to-be-found and jump in the above code snippet. To understand how this action will be resolved we take a look at an example action:
#<A ACTION (TYPE NAVIGATING) (LOCATION #<A LOCATION (VISIBLE-FOR PR2) (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME kitchen_sink_block_counter_top) (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE 0.5)>)>)>
To resolve the nested location designator ?robot-location in this action the function cram_manipulation_interfaces::get-location-poses will be called twice with the following location designators:
#<A LOCATION (VISIBLE-FOR PR2) (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME "kitchen_sink_block_counter_top") (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE 0.5)>)>
This designator is a subset of the action designator above and …
#<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME "kitchen_sink_block_counter_top") (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE 0.5)>
this location designator is the subset of the above location designator. Since we have two location designators to resolve the function cram_manipulation_interfaces::get-location-poses will be called twice returning both times a lazy list of poses:
(#<CL-TRANSFORMS:POSE #<3D-VECTOR (1.5d0 0.9000000953674316d0 0.8500000258286794d0)> #<QUATERNION (0.0d0 0.0d0 0.9084313017742992d0 0.41803417319239833d0)>> . #S(CRAM-UTILITIES::LAZY-CONS-ELEM :GENERATOR #<CLOSURE (LAMBDA () :IN CRAM-UTILITIES:LAZY-MAPCAN) {1018B51EBB}>))
Since the type of the action is navigating the function cram_fetch_deliver_plans::go-without-collisions can be evaluated with the above pose.
The procedure can be visualized with the Bullet World too:

This is the costmap after we called get-location-poses the first time only with the object designator.

This is the costmap after we called the nested location designator with get-location-poses.

This is after the execution of the navigation action designator.
;; if perception action fails, try another `?search-location' and retry (cpl:with-retry-counters ((search-location-retries retries)) (cpl:with-failure-handling (((or common-fail:perception-low-level-failure common-fail:looking-high-level-failure) (e) (common-fail:retry-with-loc-designator-solutions ?search-location search-location-retries (:error-object-or-string e :warning-namespace (fd-plans search-for-object) :reset-designators (list ?robot-location))))) (exe:perform (desig:an action (type turning-towards) (target ?search-location))) (exe:perform (desig:an action (type detecting) (object ?object-designator)))))))))))
Here we try to turn towards the location to search for and try to detect the object. If on of these action fails, we try like the parameter retries says times again. If it stills fails we throw the error object-nowhere-to-be-found and try therefore then first to navigate the robot before detecting again the object.
The detection action calls the perceive function in cram_mobile_pick_place_plans/src/atomic-action-plans to detect the object and returns a motion designator. The function turn-towards will create a looking action designator which calls the look-at function in the above file too.
At the end the function search-for-object returns an object designator with a pose like this e. g.:
#<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME "kitchen_sink_block_counter_top") (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((:POSE #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560865249078827d9 #<3D-VECTOR (0.8618418535601576d0 0.028947115308607385d0 0.8886420529683431d0)> #<QUATERNION (-0.004970445237876797d0 -0.0035147137040045353d0 0.10407392205337866d0 0.994550963155759d0)>>) (:TRANSFORM #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865249078827d9 #<3D-VECTOR (0.8618418535601576d0 0.028947115308607385d0 0.8886420529683431d0)> #<QUATERNION (-0.004970445237876797d0 -0.0035147137040045353d0 0.10407392205337866d0 0.994550963155759d0)>>) (:POSE-IN-MAP #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "map", STAMP: 1.560865249078827d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>) (:TRANSFORM-IN-MAP #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865249078827d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>)))>
go-without-collisions
(defun go-without-collisions (&key ((:location ?navigation-location)) &allow-other-keys) (declare (type desig:location-designator ?navigation-location)) "Check if navigation goal is in reach, if not propagate failure up, if yes, perform GOING action while ignoring failures." (exe:perform (desig:an action (type positioning-arm) (left-configuration park) (right-configuration park)))
First we move the arms in the park position, so they do not hit anything on their way.
(proj-reasoning:check-navigating-collisions ?navigation-location)
Then we check if the requested location is in collision with the bullet world.
(setf ?navigation-location (desig:current-desig ?navigation-location)) (cpl:with-failure-handling ((common-fail:navigation-low-level-failure (e) (roslisp:ros-warn (pp-plans navigate) "Low-level navigation failed: ~a~%.Ignoring anyway." e) (return))) (exe:perform (desig:an action (type going) (target ?navigation-location)))))
Then we try to go with the action designator to the desired location, if it fails, because it was an navigation-low-level-failure, we print a message and ignore it by returning.
turn-towards
(defun turn-towards (&key ((:target ?look-target)) ((:robot-location ?robot-location)) &allow-other-keys) (declare (type desig:location-designator ?look-target ?robot-location)) "Perform a LOOKING action, if looking target twists the neck, turn the robot base such that it looks in the direction of target and look again."
As input parameters we get the location where the robot should look and where it should stand for doing this. So both parameters have the type of location designator.
(cpl:with-failure-handling ((desig:designator-error (e) (roslisp:ros-warn (fd-plans turn-towards) "Desig ~a could not be resolved: ~a~%Cannot look." ?look-target e) (cpl:fail 'common-fail:looking-high-level-failure)) (common-fail:navigation-high-level-failure (e) (roslisp:ros-warn (fd-plans turn-towards) "When turning around navigation failure happened: ~a~%~ Cannot look." e) (cpl:fail 'common-fail:looking-high-level-failure)))
If the referencing of the designators below with type looking or navigation fail designator-error or if especially the navigation fails with a navigation-high-level-failure error, although this is not implemented since errors will be ignored (see go-without-collisions), the error looking-high-level-failure will be thrown.
(cpl:with-retry-counters ((turn-around-retries 1)) (cpl:with-failure-handling ((common-fail:ptu-low-level-failure (e) (roslisp:ros-warn (pp-plans turn-towards) "~a~%Turning around." e) (cpl:do-retry turn-around-retries (cpl:par (exe:perform (desig:an action (type navigating) (location ?robot-location))) (exe:perform (desig:an action (type looking) (direction forward)))) (cpl:retry)) (roslisp:ros-warn (pp-plans turn-towards) "Turning around didn't work :'(~%") (cpl:fail 'common-fail:looking-high-level-failure)))
Now the robot tries with
(exe:perform (desig:an action (type looking) (target ?look-target)))))))
to look at a location. If this fails with an ptu-low-level-failure error the robot tries turn-around-retries times to turn around and look forward. Then cpl:retry will be called and the robot tries to look at the location ?look-target again.
fetch
(defun fetch (&key ((:object ?object-designator)) ((:arms ?arms)) ((:grasps ?grasps)) ((:robot-location ?pick-up-robot-location)) pick-up-action &allow-other-keys) (declare (type desig:object-designator ?object-designator) (type list ?arms ?grasps) ;; ?pick-up-robot-location should not be NULL at the beginning ;; but can become NULL during execution of the plan (type (or desig:location-designator null) ?pick-up-robot-location) (type (or desig:action-designator null) pick-up-action)) "Fetches a perceived object `?object-designator' with one of arms in the `?arms' lazy list (if not NIL) and one of grasps in `?grasps' if not NIL, while standing at `?pick-up-robot-location' and using the grasp and arm specified in `pick-up-action' (if not NIL)."
The documentation of this method describes the input parameters and in the declare section you see which types the designators have.
(cpl:with-failure-handling ((desig:designator-error (e) (roslisp:ros-warn (fd-plans fetch) "~a~%Propagating up." e) (cpl:fail 'common-fail:object-unfetchable :object ?object-designator :description "Some designator could not be resolved.")))
As always if any of the designators below cannot resolve the error designator-error will be thrown.
;; take a new `?pick-up-robot-location' sample if a failure happens (cpl:with-retry-counters ((relocation-for-ik-retries 20)) (cpl:with-failure-handling (((or common-fail:navigation-goal-in-collision common-fail:looking-high-level-failure common-fail:perception-low-level-failure common-fail:object-unreachable common-fail:manipulation-low-level-failure) (e) (common-fail:retry-with-loc-designator-solutions ?pick-up-robot-location relocation-for-ik-retries (:error-object-or-string (format NIL "Object of type ~a is unreachable: ~a" (desig:desig-prop-value ?object-designator :type) e) :warning-namespace (fd-plans fetch) :rethrow-failure 'common-fail:object-unfetchable))))
If the navigation, turning or picking up fails, a new location from which the robot should pick up the object will be referenced. If it needs more then relocation-for-ik-retries times a object-unfetchable error will be thrown.
;; navigate, look, detect and pick-up (exe:perform (desig:an action (type navigating) (location ?pick-up-robot-location)))
The first action should move the robot without any collisions to the location ?pick-up-robot-location. The location designator looks e. g. like this:
#<A ACTION (TYPE NAVIGATING) (LOCATION #<A LOCATION (REACHABLE-FOR PR2) (OBJECT #<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME kitchen_sink_block_counter_top) (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((POSE #<POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560342793205295d9 #<3D-VECTOR (0.9527269311937743d0 0.04533943003760865d0 0.8886405270894369d0)> #<QUATERNION (-4.873585828813879d-4 -0.005999954466232327d0 0.8317066648737138d0 0.5551826897033202d0)>>) (TRANSFORM #<TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560342793205295d9 #<3D-VECTOR (0.9527269311937743d0 0.04533943003760865d0 0.8886405270894369d0)> #<QUATERNION (-4.873585828813879d-4 -0.005999954466232327d0 0.8317066648737138d0 0.5551826897033202d0)>>) (POSE-IN-MAP #<POSE-STAMPED FRAME-ID: "map", STAMP: 1.560342793205295d9 #<3D-VECTOR (1.5135019938151042d0 0.625667953491211d0 0.8886405309041341d0)> #<QUATERNION (-0.001493357471190393d0 -0.005831539630889893d0 0.7260335087776184d0 0.6876329779624939d0)>>) (TRANSFORM-IN-MAP #<TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560342793205295d9 #<3D-VECTOR (1.5135019938151042d0 0.625667953491211d0 0.8886405309041341d0)> #<QUATERNION (-0.001493357471190393d0 -0.005831539630889893d0 0.7260335087776184d0 0.6876329779624939d0)>>)))>)>)>
Since we already searched the object we know the pose of the object which is therefore in the location designator. Nevertheless, we need a pose where the robot can reach the object from. So the location designator needs to be resolved by calling the function cram_manipulation_interfaces::get-location-poses, which then will return a pose. Here is a picture showing the position and costmap in the bullet world simulation after the execution of the navigation.

(exe:perform (desig:an action (type turning-towards) (target (desig:a location (of ?object-designator)))))
The second actions turn the robot towards the location of the object ?object-designator. For this the following example actions will be created:
#<A ACTION (TYPE TURNING-TOWARDS) (TARGET #<A LOCATION (OF #<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME kitchen_sink_block_counter_top) (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((POSE #<POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (TRANSFORM #<TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (POSE-IN-MAP #<POSE-STAMPED FRAME-ID: "map", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>) (TRANSFORM-IN-MAP #<TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>)))>)>)>
And therefore get-location-poses will be called again with:
#<A LOCATION (OF #<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME "kitchen_sink_block_counter_top") (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((:POSE #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (:TRANSFORM #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (:POSE-IN-MAP #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "map", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>) (:TRANSFORM-IN-MAP #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>)))>)>
and returns a lazy list of pose-stamped with which then a looking action can be executed.
#<A ACTION (TYPE LOOKING) (TARGET #<A LOCATION (OF #<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME kitchen_sink_block_counter_top) (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((POSE #<POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (TRANSFORM #<TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (0.6370369976225629d0 -0.19510516177313175d0 0.8886420529683431d0)> #<QUATERNION (-0.005410600376438884d0 -0.0027899711686998735d0 -0.0351292935672039d0 0.9993642272387178d0)>>) (POSE-IN-MAP #<POSE-STAMPED FRAME-ID: "map", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>) (TRANSFORM-IN-MAP #<TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560865813733836d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.0029810641426593065d0 5.163228488527238d-4 0.9999813437461853d0)>>)))>)>)>
(cpl:with-retry-counters ((regrasping-retries 1)) (cpl:with-failure-handling ((common-fail:gripper-low-level-failure (e) (roslisp:ros-warn (fd-plans fetch) "Misgrasp happened: ~a~%" e) (cpl:do-retry regrasping-retries (roslisp:ros-info (fd-plans fetch) "Reperceiving and repicking...") (exe:perform (desig:an action (type positioning-arm) (left-configuration park) (right-configuration park))) (cpl:retry)) (roslisp:ros-warn (fd-plans fetch) "No more regrasping retries left :'(") (cpl:fail 'common-fail:object-unreachable :description "Misgrasp happened and retrying didn't help.")))
Next the failure handling for grasping is written since, if it fails the object should be detected one more time and the different arms and grasps should be tried again. All of these is done afterwards, that's why it is defined here before all that.
(let ((?more-precise-perceived-object-desig (exe:perform (desig:an action (type detecting) (object ?object-designator)))))
To get a more precise location of the object the object ?object-designator will be detected from the robot. If it fails, a new location ?pick-up-robot-location will be referenced like mentioned above.
(let ((?arm (cut:lazy-car ?arms))) ;; if picking up fails, try another arm (cpl:with-retry-counters ((arm-retries 1)) (cpl:with-failure-handling (((or common-fail:manipulation-low-level-failure common-fail:object-unreachable desig:designator-error) (e) (common-fail:retry-with-list-solutions ?arms arm-retries (:error-object-or-string (format NIL "Manipulation failed: ~a.~%Next." e) :warning-namespace (kvr plans) :rethrow-failure 'common-fail:object-unreachable) (setf ?arm (cut:lazy-car ?arms))))) (let ((?grasp (cut:lazy-car ?grasps))) ;; if picking up fails, try another grasp orientation (cpl:with-retry-counters ((grasp-retries 4)) (cpl:with-failure-handling (((or common-fail:manipulation-low-level-failure common-fail:object-unreachable desig:designator-error) (e) (common-fail:retry-with-list-solutions ?grasps grasp-retries (:error-object-or-string (format NIL "Picking up failed: ~a.~%Next" e) :warning-namespace (kvr plans)) (setf ?grasp (cut:lazy-car ?grasps)))))
To allow the robot to access the object with both arms and all possible grasps, the lists arms and grasps will be traversed like explained here.
(let ((pick-up-action ;; if pick-up-action already exists, ;; use its params for picking up (or (when pick-up-action (let* ((referenced-action-desig (desig:reference pick-up-action)) (?arm (desig:desig-prop-value referenced-action-desig :arm)) (?grasp (desig:desig-prop-value referenced-action-desig :grasp))) (desig:an action (type picking-up) (arm ?arm) (grasp ?grasp) (object ?more-precise-perceived-object-desig))))
Then we construct the picking-up action with either the action designator pick-up-action, which was an input parameter or by inserting the arm and grasp values.
(setf pick-up-action (desig:current-desig pick-up-action)) (proj-reasoning:check-picking-up-collisions pick-up-action) (setf pick-up-action (desig:current-desig pick-up-action))
First we check if this action is in collision and then
(exe:perform pick-up-action)
we try by executing the action.
(exe:perform (desig:an action (type positioning-arm) (left-configuration park) (right-configuration park))) (desig:current-desig ?object-designator)))))))))))))))
Afterwards call an action to park the arms to end this method and return the object ?object-designator.

The robot fetched the object.
deliver
(defun deliver (&key ((:object ?object-designator)) ((:arm ?arm)) ((:target ?target-location)) ((:robot-location ?target-robot-location)) place-action &allow-other-keys) (declare (type desig:object-designator ?object-designator) (type (or keyword null) ?arm) ;; don't pass NULL as ?target-location or ?target-robot-location! ;; they can turn NULL during execution but not at the beginning (type (or desig:location-designator null) ?target-location ?target-robot-location) (type (or desig:action-designator null) place-action)) "Delivers `?object-designator' to `?target-location', where object is held in `?arm' and the robot should stand at `?target-robot-location' when placing the object. If a failure happens, try a different `?target-location' or `?target-robot-location'."
The documentation of this method describes the input parameters and in the declare section you see which types the designators have.
;; Reference the `?target-location' to see if that works at all ;; If not, delivering is impossible so throw a OBJECT-UNDERLIVERABLE failure (cpl:with-failure-handling ((desig:designator-error (e) (roslisp:ros-warn (fd-plans deliver) "~a~%Propagating up." e) (cpl:fail 'common-fail:object-undeliverable :description "Some designator could not be resolved.")))
If the resolving from a designator below fails we throw the above error.
(cpl:with-retry-counters ((outer-target-location-retries 2)) (cpl:with-failure-handling (((or desig:designator-error common-fail:object-undeliverable) (e) (common-fail:retry-with-loc-designator-solutions ?target-location outer-target-location-retries (:error-object-or-string (format NIL "Undeliverable. Trying another target location.~%~a" e) :warning-namespace (fd-plans deliver) :reset-designators (list ?target-robot-location) :rethrow-failure 'common-fail:object-undeliverable))))
Again this method uses same thinking as search-for-object with an 'outer-error-handler' (catching common-fail:object-undeliverable) since we need a new ?target-robot-location too after we changed the ?target-location.
;; take a new `?target-robot-location' sample if a failure happens (cpl:with-retry-counters ((relocation-for-ik-retries 4)) (cpl:with-failure-handling (((or common-fail:navigation-goal-in-collision common-fail:object-undeliverable common-fail:manipulation-low-level-failure) (e) (common-fail:retry-with-loc-designator-solutions ?target-robot-location relocation-for-ik-retries (:error-object-or-string (format NIL "Object is undeliverable from base location.~%~a" e) :warning-namespace (fd-plans deliver) :rethrow-failure 'common-fail:object-undeliverable)))) ;; navigate (exe:perform (desig:an action (type navigating) (location ?target-robot-location)))
In our example the following location is the target:
#<A LOCATION (REACHABLE-FOR PR2) (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME KITCHEN-ISLAND-SURFACE) (OWL-NAME "kitchen_island_counter_top") (PART-OF KITCHEN)>) (CONTEXT TABLE-SETTING) (FOR #<A OBJECT (TYPE BOWL)>) (OBJECT-COUNT 3) (SIDE BACK) (SIDE RIGHT) (RANGE-INVERT 0.5)>)>
As you can see we have again like in search-for-object a nested location designator. Therefore, CRAM calls get-location-pose again with the outer and inner location designator and returns two times a lazy list of poses.
If the navigation fails, we try four times another robot location where it can place the object. At the fifth retry the delivering method fails with an common-fail:navigation-goal-in-collision or common-fail:manipulation-low-level-failure error. The common-fail:common-fail:object-undeliverable error will be thrown from below code snippet.
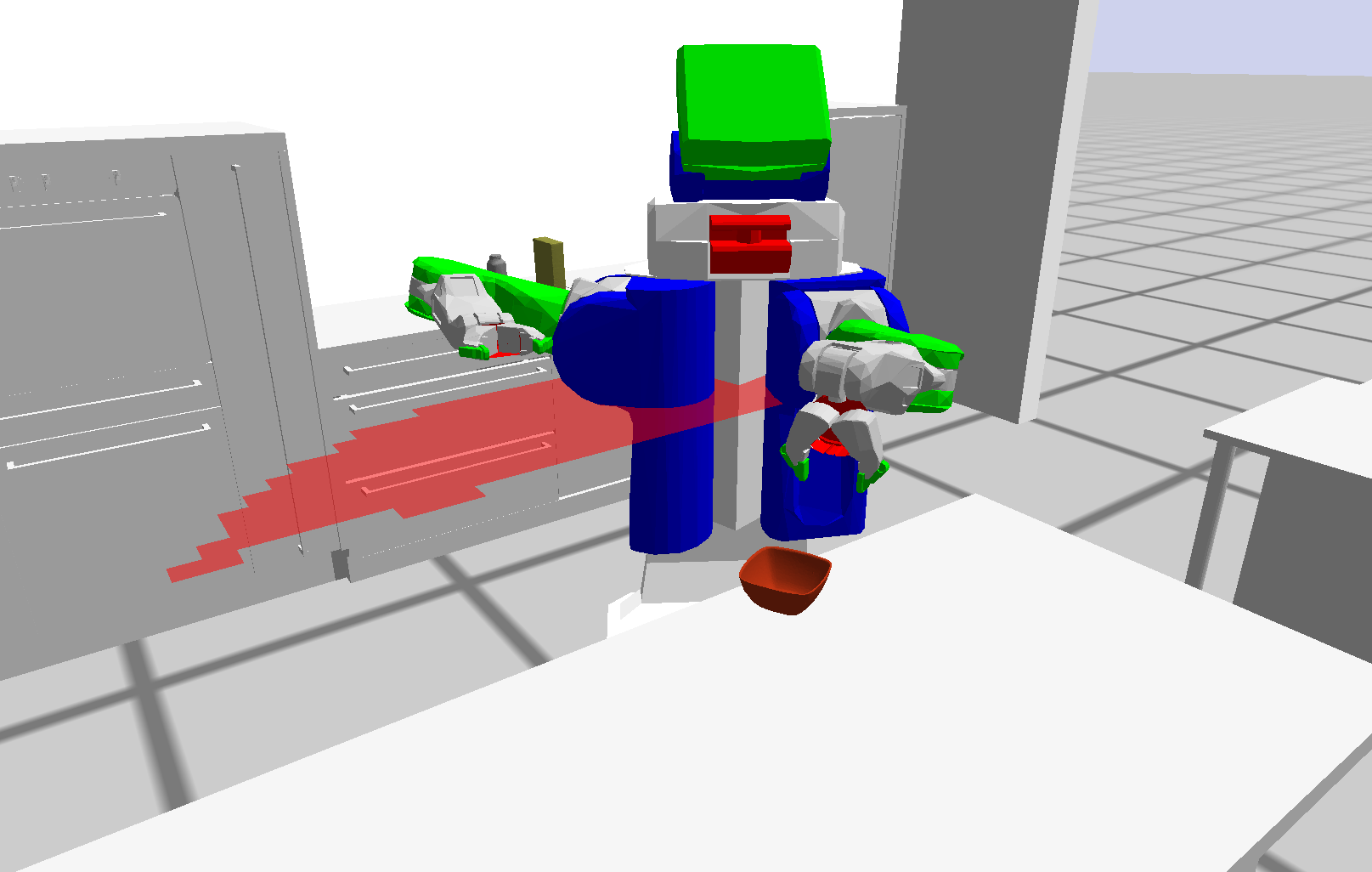
If everything goes as intended the robot will stay in front of his target robot location like seen here.

The robot moved to the target location in the deliver function.
;; take a new `?target-location' sample if a failure happens (cpl:with-retry-counters ((target-location-retries 9)) (cpl:with-failure-handling (((or common-fail:looking-high-level-failure common-fail:object-unreachable common-fail:high-level-failure) (e) (common-fail:retry-with-loc-designator-solutions ?target-location target-location-retries (:error-object-or-string (format NIL "Placing failed: ~a" e) :warning-namespace (fd-plans deliver) :reset-designators (list ?target-robot-location) :rethrow-failure 'common-fail:object-undeliverable) (roslisp:ros-warn (fd-plans deliver) "Retrying with new placing location ...~%")))) ;; look (exe:perform (desig:an action (type turning-towards) (target ?target-location)))
In the following picture the robot tries to locate the object within nine retires.

After trying to often the method throws an common-fail:object-undeliverable error, which will be catched in the 'outer-error-handling' snippet mentioned above. Therefore, the the method will then try to navigate again the robot to a new ?target-robot-location. This means get-location-poses will be called again.

;; place (let ((place-action (or (when place-action (let* ((referenced-action-desig (desig:reference place-action)) (?arm (desig:desig-prop-value referenced-action-desig :arm)) (?projected-target-location (desig:desig-prop-value referenced-action-desig :target))) (desig:an action (type placing) (arm ?arm) (object ?object-designator) (target ?projected-target-location)))) (desig:an action (type placing) (desig:when ?arm (arm ?arm)) (object ?object-designator) (target ?target-location)))))
With the valid standing point position for the robot (?target-robot-location) …

… and after turning towards the object (with the coordination ?target-location), we can assemble the placing action…
;; test if the placing trajectory is reachable and not colliding (setf place-action (desig:current-desig place-action)) (proj-reasoning:check-placing-collisions place-action) (setf place-action (desig:current-desig place-action))
… to then check if it leads to collisions and …
;; test if the placing pose is a good one -- not falling on the floor ;; test function throws a high-level-failure if not good pose (proj-reasoning:check-placing-pose-stability ?object-designator ?target-location)
… test if it places the object on a valid surface. The constructed placing action looks in our example like this:
#<A ACTION (TYPE PLACING) (OBJECT #<A OBJECT (LOCATION #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME SINK-AREA-SURFACE) (OWL-NAME "kitchen_sink_block_counter_top") (PART-OF KITCHEN)>) (SIDE LEFT) (SIDE FRONT) (RANGE-INVERT 0.5)>) (TYPE BOWL) (NAME BOWL-1) (POSE ((:POSE #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "base_footprint", STAMP: 1.560941941216607d9 #<3D-VECTOR (0.5515197167662196d0 3.296925998874656d-8 0.8886420529683431d0)> #<QUATERNION (-0.005169252184379536d0 -0.003215177926776794d0 0.04518378557908993d0 0.9989601391642928d0)>>) (:TRANSFORM #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "base_footprint", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560941941216607d9 #<3D-VECTOR (0.5515197167662196d0 3.296925998874656d-8 0.8886420529683431d0)> #<QUATERNION (-0.005169252184379536d0 -0.003215177926776794d0 0.04518378557908993d0 0.9989601391642928d0)>>) (:POSE-IN-MAP #<CL-TRANSFORMS-STAMPED:POSE-STAMPED FRAME-ID: "map", STAMP: 1.560941941216607d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.00298106437548995d0 5.163229070603848d-4 0.9999813437461853d0)>>) (:TRANSFORM-IN-MAP #<CL-TRANSFORMS-STAMPED:TRANSFORM-STAMPED FRAME-ID: "map", CHILD-FRAME-ID: "bowl_1", STAMP: 1.560941941216607d9 #<3D-VECTOR (1.3993186950683594d0 0.8007776260375976d0 0.8886420567830403d0)> #<QUATERNION (-0.005307710729539394d0 -0.00298106437548995d0 5.163229070603848d-4 0.9999813437461853d0)>>)))>) (TARGET #<A LOCATION (ON #<A OBJECT (TYPE COUNTER-TOP) (URDF-NAME KITCHEN-ISLAND-SURFACE) (OWL-NAME "kitchen_island_counter_top") (PART-OF KITCHEN)>) (CONTEXT TABLE-SETTING) (FOR #<A OBJECT (TYPE BOWL)>) (OBJECT-COUNT 3) (SIDE BACK) (SIDE RIGHT) (RANGE-INVERT 0.5)>)>
After all this we can finally execute the place action.
(exe:perform place-action))))))))))
transport
(defun transport (&key ((:object ?object-designator)) ((:search-location ?search-location)) ((:search-robot-location ?search-base-location)) ((:fetch-robot-location ?fetch-robot-location)) ((:arm ?arm)) ((:grasp ?grasp)) ((:arms ?arms)) ((:grasps ?grasps)) ((:deliver-location ?delivering-location)) ((:deliver-robot-location ?deliver-robot-location)) search-location-accessible delivery-location-accessible &allow-other-keys)
(unless search-location-accessible (exe:perform (desig:an action (type accessing) (location ?search-location) (distance 0.48))))
If the object is not accessible e. g. if you want to pick up a fork in a drawer, this drawer has to be first
be opened by the robot. For this the action accessing is called.
(unwind-protect (let ((?perceived-object-designator (exe:perform (desig:an action (type searching) (object ?object-designator) (location ?search-location) (desig:when ?search-base-location (robot-location ?search-base-location)))))
To fetch the object the object first has to be searched. For this we create and resolve an action designator of type searching with set object-designator, the robot-location if available and the search-location like for the bowl e. g. this:
(desig:a location (on (desig:an object (type counter-top) (urdf-name sink-area-surface) (owl-name "kitchen_sink_block_counter_top") (part-of kitchen))) (side left) (side front) (range-invert 0.5)))
(unless ?fetch-robot-location (setf ?fetch-robot-location (desig:a location (reachable-for ?robot-name) (desig:when ?arm (arm ?arm)) (object ?perceived-object-designator)))) (unless ?deliver-robot-location (setf ?deliver-robot-location (desig:a location (reachable-for ?robot-name) (location ?delivering-location))))
Moreover, we need the fetch- and deliver-robot-locations. The ?fetch-robot-location location-designator take the the perceived object and the deliver-robot-location location designator take the location where it should be delivered to.
;; If running on the real robot, execute below task tree in projection ;; N times first, then pick the best parameterization ;; and use that parameterization in the real world. ;; If running in projection, just execute the task tree below as normal. (let (?fetch-pick-up-action ?deliver-place-action) (proj-reasoning:with-projected-task-tree (?fetch-robot-location ?fetch-pick-up-action ?deliver-robot-location ?deliver-place-action) 3 #'proj-reasoning:pick-best-parameters-by-distance (let ((?fetched-object (exe:perform (desig:an action (type fetching) (desig:when ?arm (arm ?arm)) (desig:when ?grasp (grasp ?grasp)) (desig:when ?arms (arms ?arms)) (desig:when ?grasps (grasps ?grasps)) (object ?perceived-object-designator) (robot-location ?fetch-robot-location) (pick-up-action ?fetch-pick-up-action)))))
Now we create the action designator fetching and execute it. If the arms and graps are given we set them so they will be used by fetch. Moreover, the perceived object is given and the ?fetch-robot-location like the example above. For the low level function pick-up a placeholder is given too.
(unless delivery-location-accessible (exe:perform (desig:an action (type accessing) (location ?delivering-location) (distance 0.3)))) (unwind-protect (exe:perform (desig:an action (type delivering) (desig:when ?arm (arm ?arm)) (object ?fetched-object) (target ?delivering-location) (robot-location ?deliver-robot-location) (place-action ?deliver-place-action))) (unless delivery-location-accessible (exe:perform (desig:an action (type sealing) (location ?delivering-location) (distance 0.3))))))))))
In the last part of this function we first check if the deliver location is accessible (delivery-location-accessible) and if not get access with executing an action. Then we deliver the fetched object to the ?delivering-location by moving the robot_base to ?deliver-robot-location and given an placeholder for the low-level function place.
(unless search-location-accessible (exe:perform (desig:an action (type sealing) (location ?search-location) (distance 0.48))))))
At the end we seal the e. g. drawer we got our fork from with a specific distance towards the drawer.