Note: this page is deprecated. Please use this one instead.
Writing Plans
with-policy
Policies can be used to define generic monitoring behavior that should run concurrently besides main functionality code. Such a policy might be monitoring
- the position of an object inside a robot gripper to see whether it is moving out of the gripper (losing the object)
- the position of an object in the real world, in order to keep the robot's head pointing towards it
- the collision of a robot joint with objects in the real world
- generic events that must definitely interrupt a certain piece of code, but are too specialized to be implemented directly in the monitored code itself
A policy consists of multiple parts:
- A name (to identify it)
- A description string (to make its purpose clear)
- A parameter list (which can be used to specialize a generic policy for a situation at hand, without generating a new policy every time the situation changes slightly)
- Code blocks that need to be evaluated during monitoring
Usage example
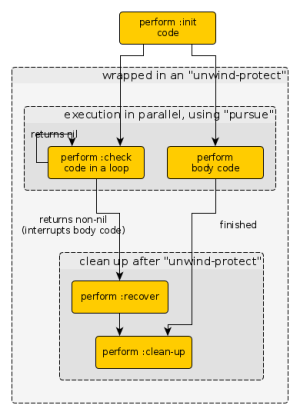
An example of how to define a policy is shown here. The policy accepts two custom parameters, one defining a maximum number and one a match number. During execution of the main body code (which is really just a loop with an output here), it checks a randomly generated number (ranging from 0 to max-num) against the match number match-num. If this is the case (and it will be, eventually), it interrupts (and ends) the main body code and executes the :recover code, followed by the :clean-up code (both just outputting something here).
(define-policy my-policy (max-num match-num) "This is an example policy." (:init (format t "Initializing policy~%") t) (:check (format t "Checking if random number from 0 to ~a equals ~a~%" max-num match-num) (let ((rnd (random max-num))) (format t "Got number ~a~%" rnd) (cond ((eql rnd match-num) (format t "Match~%") t) (t (sleep 1))))) (:recover (format t "Running recovery mechanisms~%")) (:clean-up (format t "Running clean-up~%")))
The calling code for using the policy uses with-named-policy to refer to the name as specified while defining the policy. The second parameter is a list of parameter values for customizing the policy instance. The rest of the code should be pretty self explanatory.
(top-level (with-named-policy 'my-policy (10 5) (loop do (format t "Main loop cycle.~%") (sleep 2))))
Exception handling
When policies are used, multiple failures can be signalled. The most meaningful of those are
policy-not-found: Signalled when a named policy is used that was not defined before.policy-init-failed: Signalled when initialization of a policy went wrong (i.e.:initreturnednil).policy-check-condition-met: The:checkcondition of the policy returned a non-nilvalue,:recoverwas executed and thebodycode was interrupted before it could complete execution.
If one wants to monitor the triggering of a policy's :check condition, this can be achieved like this:
(top-level (with-failure-handling ((policy-check-condition-met (f) (declare (ignore f))is available that the given (do-custom-handling-here) (retry))) ;; Or whatever seems appropriate in your use-case e.g. (return) (with-named-policy 'my-policy (10 5) (loop do (format t "Main loop cycle.~%") (sleep 2)))))
Using multiple policies at once
When multiple policies are to be used (either a mix of different policies, or the same policy multiple times, each with different parameters), two helpful macros can be used: with-policies and with-named-policies. Both of these take lists of policies, together with their respective instantiation parameters, as arguments.
When policy instances by the names my-policy-object and my-other-policy-object should be used, the following code snippet reflects this behaviour. The policy my-policy-object takes two ints as parameters, while is available that the givenmy-other-policy-object takes a string as an argument.
(with-policies ((my-policy-object (3 1)) (my-policy-object (100 4)) (my-other-policy-object ("Test"))) (body-code))
In this example, the resulting code will be equivalent to the following:
(with-policy my-policy-object (3 1) (with-policy my-policy-object (100 4) (with-policy my-other-policy-object ("Test") (body-code))))
The same princple applies to with-named-policies, with the only difference being that it does not take policy instances, but policy name symbols as parameters:
(with-named-policies (('my-policy (3 1)) ('my-policy (100 4)) ('my-other-policy ("Test"))) (body-code))
This results in the same behavior as:
(with-named-policy 'my-policy (3 1) (with-named-policy 'my-policy (100 4) (with-named-policy 'my-other-policy ("Test") (body-code))))
Built-in Policies
timeout-policy
When a piece of code only has a limited maximum amount of time for execution (and must be aborted after that duration), the timeout-policy comes in handy.
Use it like this:
(with-policy cpl:timeout-policy (5.0) ; Timeout after 5.0 seconds (fractions may be used) (body-code-goes-here))
And for catching the check condition when the timeout actually happens:
(with-failure-handling ((policy-check-condition-met (f) (declare (ignore f)) (handle-error-here-and-maybe-retry))) (with-policy cpl:timeout-policy (5.0) (body-code-goes-here)))
The timeout-policy stops the given body code after a given amount of time (in seconds) if it hasn't finished by then. This helps to add a timeout functionality to functions that do not inherently support a timeout mechanism (blocking function calls).